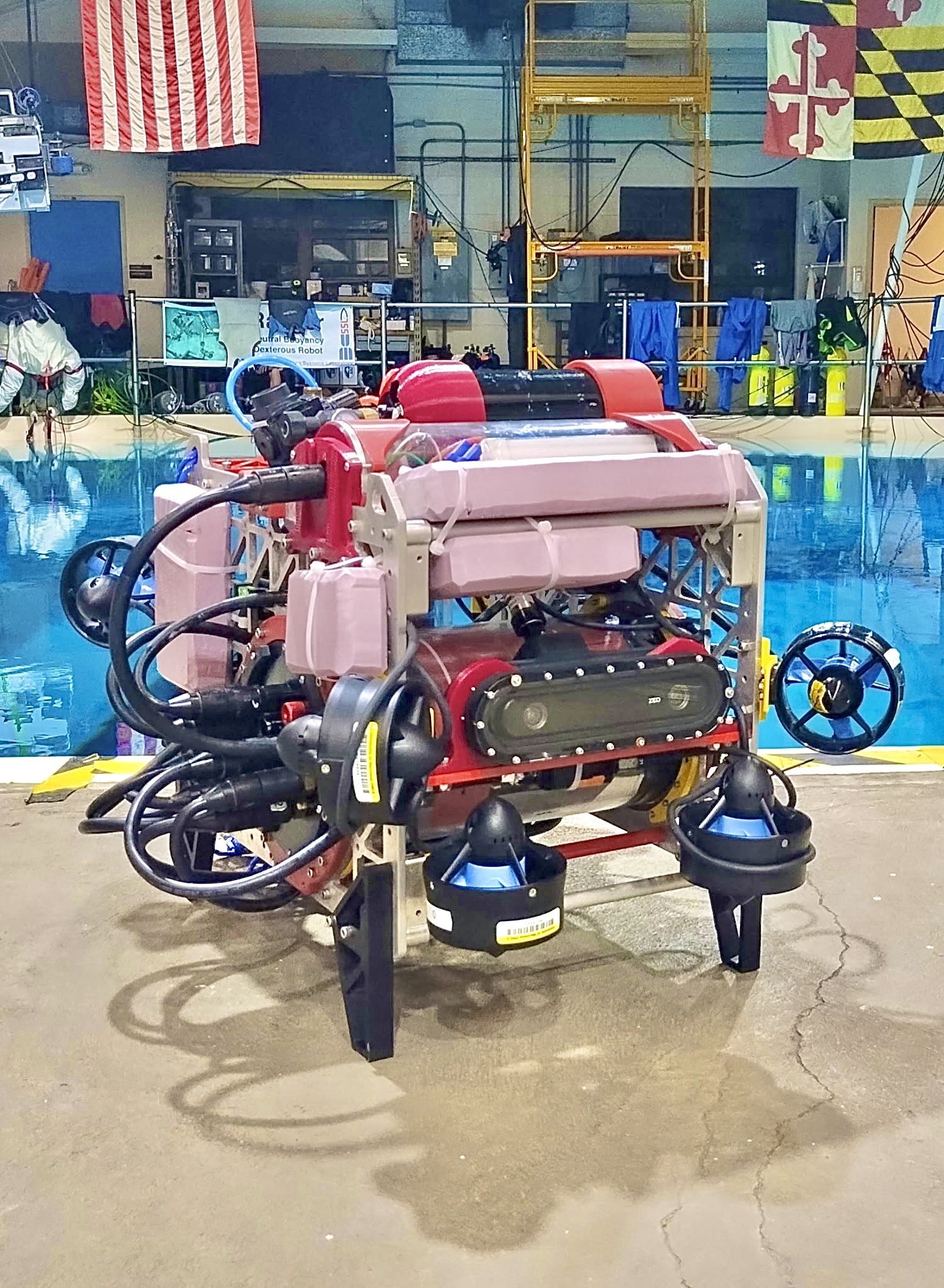
Qubo, Somali for “turtle”, is a robotic submarine iterated on many times, swimming in the 2017 competition and again in 2022 and 2023. Each time, its modular chassis has allowed for the development of end effectors, including a torpedo launcher, claw, and marker dropper; a completely overhauled electrical interior; new sensors, including three fisheye cameras and a Doppler Velocity Logger (DVL); plus a compatible software stack that autonomously collects data and makes decisions. The team competes in the RoboSub competition every August. Qubo must autonomously navigate an underwater course filled with various tasks, such as shooting at a target, doing flips through a gate, and much more. All of this has to happen with zero communication to the robot. This competition brings a unique challenge to full autonomy, incorporating software, electrical, and mechanical engineering together to navigate a harsh environment.
Computer Vision
Embedded
Sonar
+2 more
Testudog’s name speaks for itself. This four-legged animal will walk, run, and jump all around campus through 12 quasi direct-drive motors, a fleet of sensors and a huge battery. The robot was first ideated in Fall 2022 taking a built-from-scratch approach. Everything mechanical and electrical has so far been produced solely by the team, and both custom and prebuilt software has brought it together. The dog first stood on its own at Maryland Day, Spring 2024, and the team plans on bringing it to life to one day autonomously navigate an obstacle course in IEEE’s ICRA Quadruped Challenge.
Dynamics and Kinematics
Simulation
Parametric Control
+1 more
The team plans to compete in the international University Rover Challenge (URC) and the Canadian Interational Rover Challenge (CIRC) in Utah every summer. Here, teams from all over the world work to make robust, reliable, autonomous platforms built for the harsh space environment. Utah’s deserts make for an environment adjacent to that of Mars, allowing teams to simulate their rovers operating on the planet. With the help of theory and simulation, the team must also demonstrate the ability to translate their product into something fit for a real trip to space. This competition successfully completes R@M’s takeover of land, air, space and sea, as they apply robotics in the most hazardous environment of them all - Space!
6 DOF Manipulator
Full chassis redesign
Navigation and control simulation
The Executive team is responsible for the overall direction and success of the club. They are responsible for the club's budget, membership, and overall operations. They are also responsible for the club's website, social media presence, marking, and overall club operations.
Website development
Financial management
Marketing and outreach