Autonomous Underwater Vehicle (AUV)
Started development in 2014, Qubo is our second-generation AUV meant to compete in the RoboSub competitions. It's our oldest and most established project.
Dive Deep into Qubo's Technical Architecture
Explore the sophisticated engineering behind our autonomous underwater vehicle. From computer vision systems to modular mechanical design, discover how we've built a competition-ready AUV.
Project Overview
Learn about our project's goals, achievements, and future plans
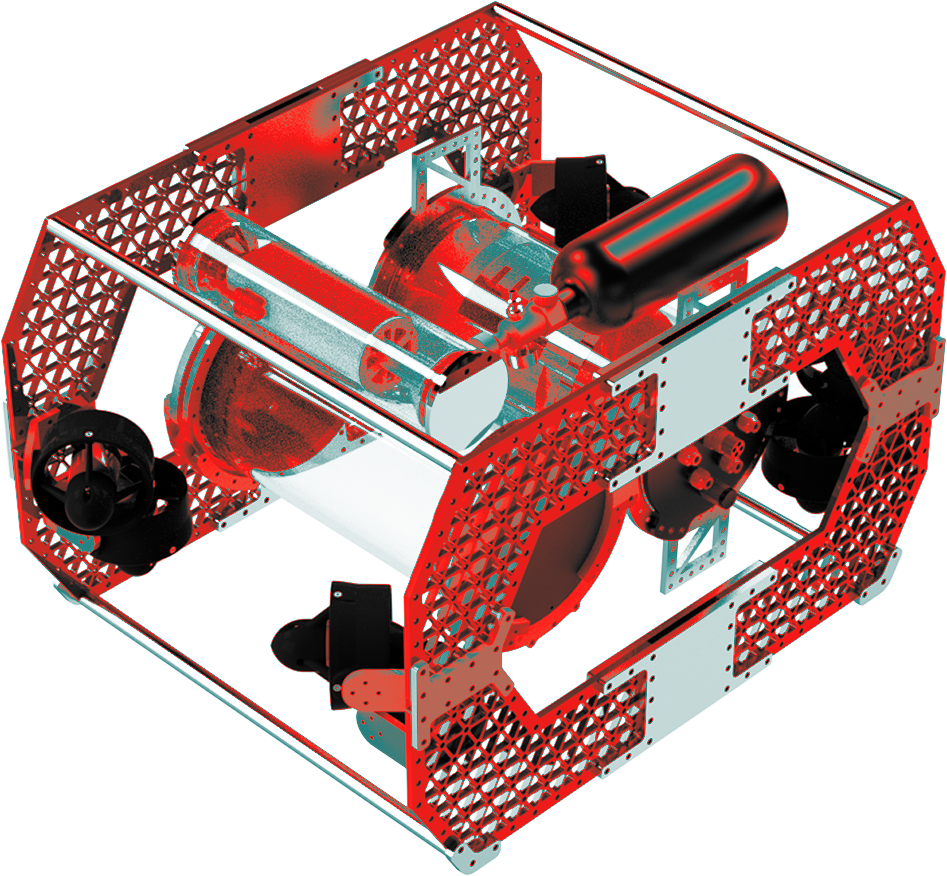
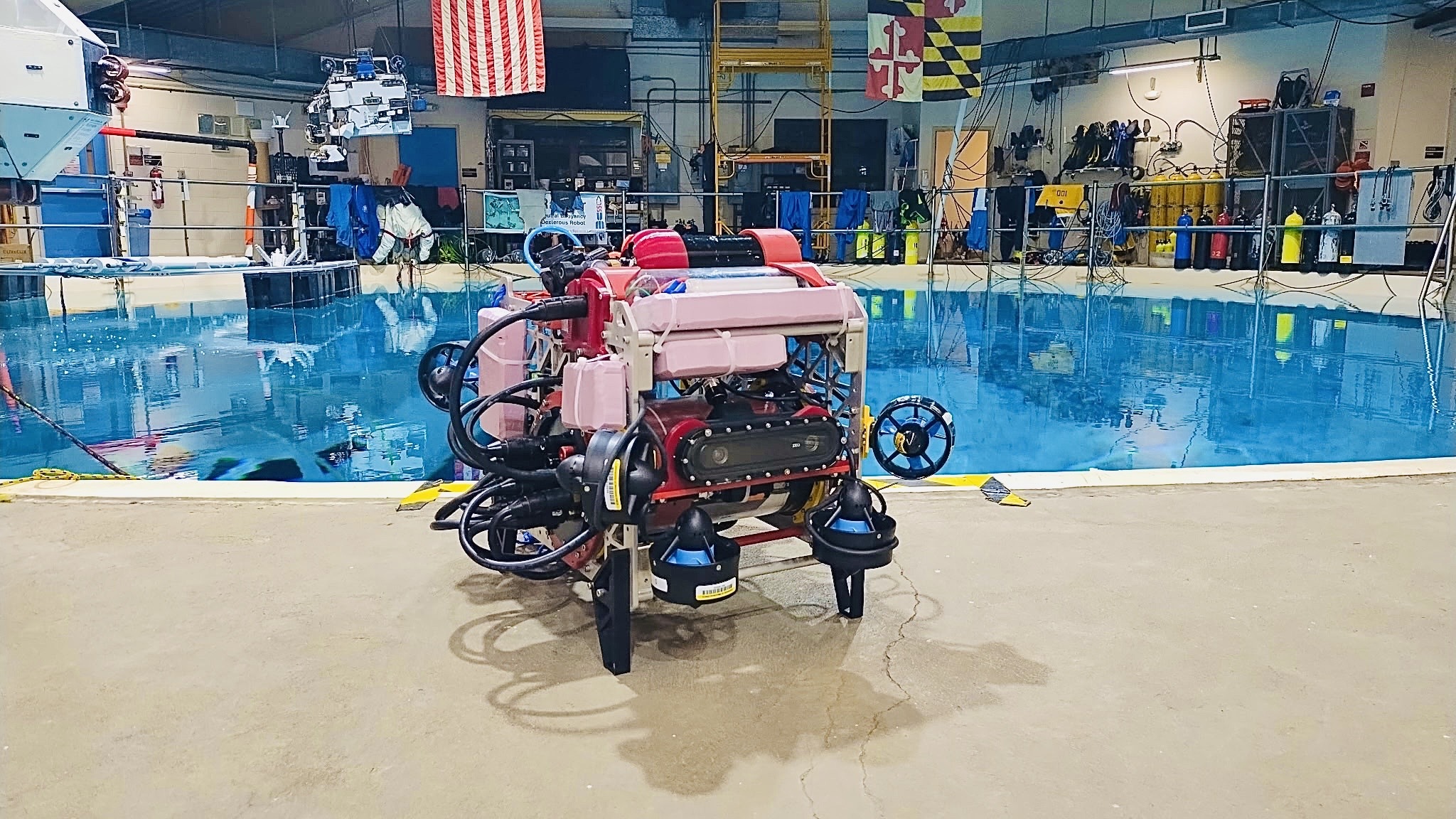
About Qubo
Qubo is our flagship autonomous underwater vehicle (AUV) that competes in the RoboSub competition. Built from the ground up by our team, it features numerous capabilities to complete a variety of tasks for the competition, including gate navigation using computer vision and sensor fusion, a claw and dropper system for object manipulation, and a torpedo system, among others. The team has been consistently iterating on Qubo since its inception, solving industry-level problems and pushing the boundaries of what has been done so far.
Project Highlights
Semifinalists at RoboSub 2024
Competed against top international teams
Second-Generation Robot
Built on lessons learned from Tortuga, the club's first robot - born in 2006!
Can Reach Up to 30 ft Underwater
It's also neutrally buoyant for efficient propulsion!
Modular Design
Capabilities for a variety of mission-specific tools, such as claw, dropper, and torpedo systems
Future Plans
TwoBo Completion
Having a smaller, secondary AUV to complete more complex RoboSub tasks
CAN Bus
Switching to a CAN Bus architecture for improved communication and control
Sonar integration
Adds added depth perception for obstacle avoidance and navigation
Autonomous Torpedo completion
Extending capabilities for deeper underwater exploration
Ready to Get Involved?
Join our team and help us continue pushing the boundaries of what's possible in robotics.
Team Meeting Times
Join our team meetings and workshops to get involved with this project.
Team Members
Meet the team! (If they aren't swimming after a runaway robot)
Note: Members not listed are hidden for privacy reasons.
Project Management
• 4 membersProject Manager
Alex Yelovich
Mechanical Officer
Reese Snook
Electrical Officer
Kurt Kovacs
Software Officer
Ishaan Ghosh
Mechanical Team
• 15 membersTwoBo Lead
Michael LeVesque
Dropper Lead
Ryan Buchler
Torpedo Lead
Tommy Wolcott
Claw Lead
William Trasatti
Systems R&D Lead
William Trasatti
Collin Rogers
Daniel Gregory
Maanav Subramanian
Nathaniel Chen
Sam Bentz
5 more members...
Electrical Team
• 12 membersAlex Yelovich
Brian Zagalsky
Eli Leopold
Larry Djatang-Tankeu
Liam Brosnan
Marcus Allen
Vassay Iqbal
5 more members...
Software Team
• 15 membersEmbedded Lead
Alex Yelovich
Computer Vision Lead
Grace Cai
Controls Lead
Jai Rastogi
Alvin Shen
Austin Thomas
Eric Xu
Kevin Nguyen
Madison Freese
Michael Kittredge
Nicolas Preda
Vaishnavi Samprati
4 more members...
Subprojects
Explore the various projects being developed in the Qubo team!
Robosub 2025 Preparations
Preparing for the Robosub 2025 competition to win!
Autonomous Torpedo
Improved, first-of-its-kind autonomous torpedo system
TwoBo
A smaller, secondary AUV for inter-robot communication
CAN Bus Integration
Switching to a CAN Bus architecture for improved systems
Claw and Dropper Development
Final iterations before competition
Buoyancy
Automatic neutral buoyancy control system
Embedded
Final iterations before competition
Computer Vision
Final iterations before competition