Quadruped Robotic Dog
Since 2023, the team has been dedicated to the design of an autonomous quadruped robot to compete in the IEEE ICRA competitions. It's our most technical project.
Project Overview
Learn about our project's goals, achievements, and future plans
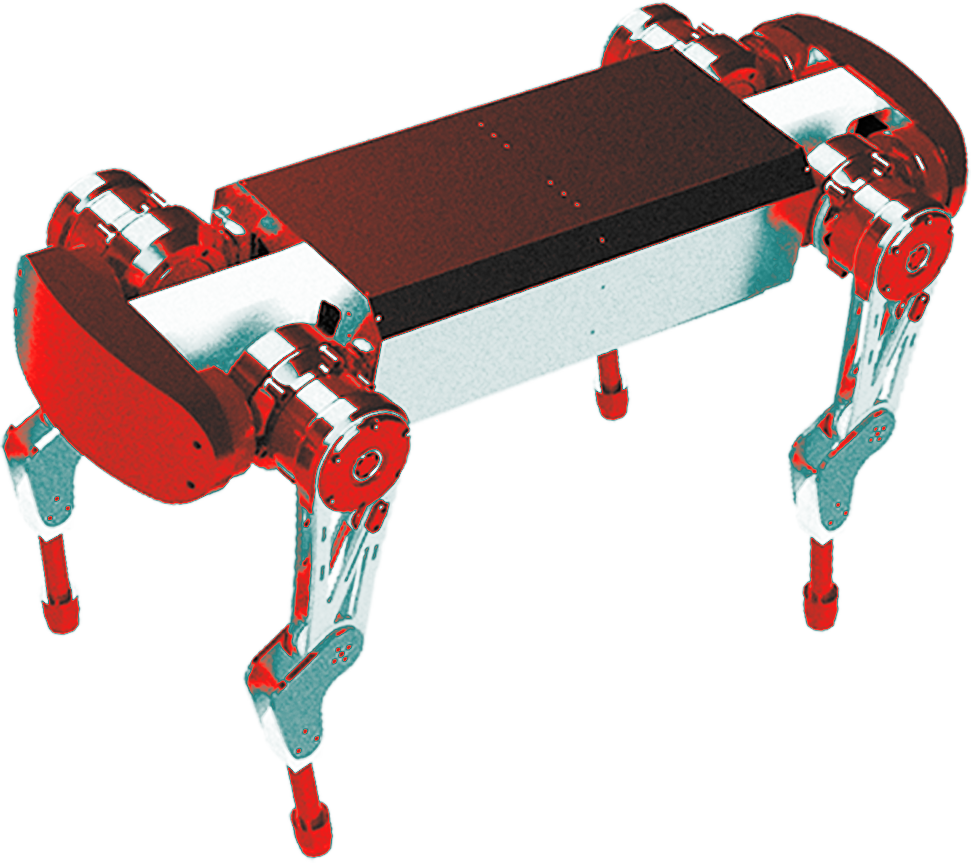
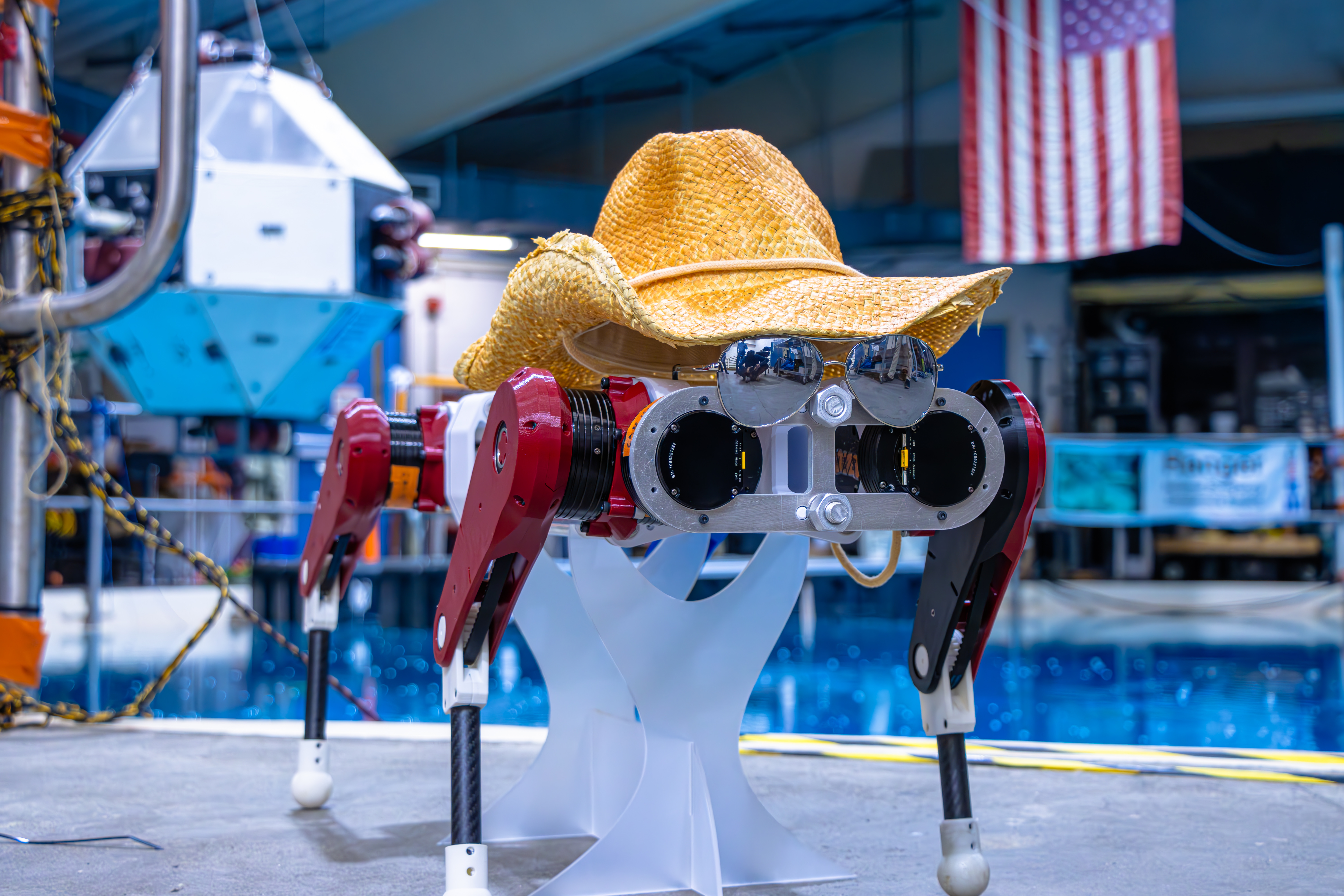
About Testudog
Testudog is our terrain-agnostic quadruped robot dog meant to be a platform to provide low-cost and fully autonomous navigation. Featuring almost entirely in-house parts, Testudog features a lightweight 3D printed frame with four modular, machined-aluminum legs; activated by Quasi-Diret Drive motors to provide twelve degrees of freedom. With advanced control systems, integrated torque sensing, and terrain-mapping sensors, Testudog has been mapping up to be an ambitious and affordable platform for competition while staying in-line with commercial counterparts.
Project Highlights
Affordable Platform
Designed using cheaper alternatives such as in-house manufactured parts and non-proprietary software and sensors
Extreme Navigation Capabilities
Design is capable of traversing extreme terrain that wheels may fail at
Intense Control Systems
Ph.D. level efficient yet complex control systems for enhanced dynamics
First Class Rapid Iteration
Constant improvements made to improve the platform's efficiency and to further decrease costs
Future Plans
Gait Development
Testudog is only able to stand right now - developing a gait will be crucial for walking
Perception and Planning
Using on-board sensors to determine most efficient way to traverse the environment
Can Bus integration
Switching to a CAN Bus architecture for improved systems
Electrical Hull
Completing an organized electrical hull to improve modular development
Ready to Get Involved?
Join our team and help us continue pushing the boundaries of what's possible in robotics.
Team Meeting Times
Join our team meetings and workshops to get involved with this project.

Team Members
Meet the team! (Probably reading research papers right now)
Note: Members not listed are hidden for privacy reasons.
Project Management
• 4 membersProject Manager
Arian Moradi
Electrical Officer
Joshua Duong
Software Officer
Arjun Mudda
Mechanical Officer
Madyann Saidi
Mechanical Team
• 8 membersAdin Kersh
Jared Marcus
Sumit Kulkarni
5 more members...
Electrical Team
• 7 membersAnthony Noya
Kai Liang
Prewitt Mandava
Simon Krivoy
3 more members...
Software Team
• 7 membersAditya Tejwani
Amy Naylor
5 more members...
Subprojects
Explore the various projects being developed in the Testudog team!
Leg Redesign
Designing and manufacturing lighter, more efficient legs
Stereo Camera Integration
Integrating stereo cameras for SLAM capabilities
Battery Development
Developing a custom battery solution for extended runtime and balance
CAN Bus Integration
Switching to a CAN Bus architecture for improved systems